In one of the most complete and used model of comfort (Vick and Hellback, 2012), the authors suggested that the interaction of the user with the environment (person, product, usage) will produce subjective perception that, influenced by the user expectation, can result in comfort, discomfort or a neutral reaction. This model could be applied also to vehicle comfort, since the environment is composed by the vehicle characteristics, such as seat comfort (Elbanhawi et al., 2015), acoustic comfort (Zhang et al., 2018), thermal comfort (Danca et al., 2016), ride comfort (Cieslak et al., 2019), users state (psychological, physiological and physical), product usage (i.e. driving style) and the infrastructure and environmental characteristics (road condition, weather…).
However, the introduction of automated vehicle shifts the focus on passengers’ behaviour and perception. Factors, such as expected driving quality, motion sickness, communication, control and trust will either be introduced as new attributes of comfort or will increase their importance in the evaluation of passenger comfort. For instance, driver expectation will change focus point, as the passengers will not rely on a driver but they will rely on the car to behave in an acceptable and trustworthy way. Motion sickness will also have an impact on the user comfort: The absence of vehicle control (and therefore the impossibility to anticipate the trajectory of the car), the engagement in non-driving task and the new distribution of seats could increase the possibility to experience discomfort when being an automated vehicle user. In new connected autonomous vehicles, the passenger will also have to rely on the fact that the vehicle has information on the intention of another vehicle and this could affect the feeling of safety of the passenger. The capability of the automated vehicle to adapt to the state and perception of the passenger will be of outmost importance for the perception of comfort and safety.
Another dynamic factor which could influence the user comfort is the autonomous vehicle motion planning, which includes attributes like speed, acceleration, jerk profiles, condition for overtaking, headway distance and traffic law abiding. Various motion planning models have been developed in the literature. For example, the Model Predictive Control (MPC) (Alcalá et al., 2018) is proposed to improve comfort. The logic includes finding the future vehicle states using a dynamic model of the vehicle. This strategy was chosen to ensure that the vehicle path accomplishes specific motion requirements of a vehicle and that is achieved by considering lateral and longitudinal dynamics simultaneously. In other words, path and speed profile are defined at the same time. The MPC includes factors such as the boundary limits, the maximum speed, the sideslip rate, the longitudinal and lateral acceleration, jerks and time minimization and create an ideal path route. The advantage of route planning in automated vehicles is the possibility to modify the parameters described above depending on, for example, the state of the passenger.
Diels et al. (2017) developed an initial framework on the attributes that an automated vehicle, in this case Shared Autonomous Vehicles (SAV), should cover to enhance the users’ comfort.
Figure 1. Map of factors describing the concept of comfort in a Shared Autonomous Vehicle (SAV). Diels et al. (2017)
Considering this approach, in order to assess the overall vehicle comfort, ego vehicle comfort factors are investigated in SUaaVE by two different points of views, the dynamic comfort and the ambient comfort. The following sections describes SUaaVE approach and the main factors considered in dynamic and ambient comfort.
The attributes of dynamic comfort are divided into user experience attributes and vehicle dynamics attributes. The difference between the two groups rely more on the type of assessment they require. Specifically, user experience attributes can be assessed by non-expert assessors, while the vehicle dynamics attributes can only be assessed by dynamic experts. The figure below depicts the two groups of attributes and the factors included in these groups.
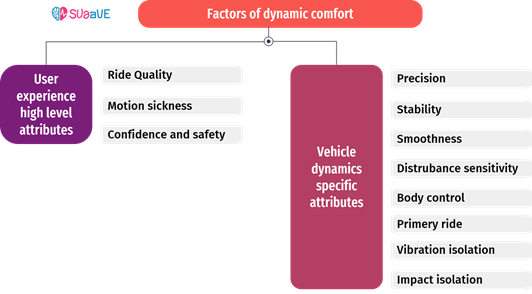
User experience high level attributes:
- Ride Quality: Well-being of the vehicle’s occupants by controlling levels of accelerations and vibrations during vehicle travel.
- Motion Sickness: Well-being of the vehicle’s occupants by controlling low frequencies body motion and absence of sickness.
- Confidence: Perception of a safe and accurate operation of the vehicle given by the absence of corrections and non-expected behaviour.
Vehicle Dynamics specific attributes:
- Precision: Capability to accurately follow a trajectory with minimum deviations of lateral error and yaw.
- Stability: Capability to maintain a controllable trajectory that is perceived as safe.
- Smoothness: Capability to perform trajectories within comfortable limits for vehicle states.
- Disturbance sensitivity: Capability to maintain trajectory and isolate passenger feeling from unexpected external inputs like cross-wind and changes in the road grip.
- Body control: Capability to control roll motion and pitch motion within comfortable limits.
- Primary ride: Capability to control low frequency vertical and longitudinal motion and acceleration within comfortable limits.
- Vibration isolation: Capability to isolate from sources of vibration and minimize accelerations.
- Impact isolation: Capability to isolate passenger from deterministic road inputs.
2. FACTORS OF AMBIENT AND POSTURAL COMFORT
Regarding comfort, there could be identified seven main attributes:
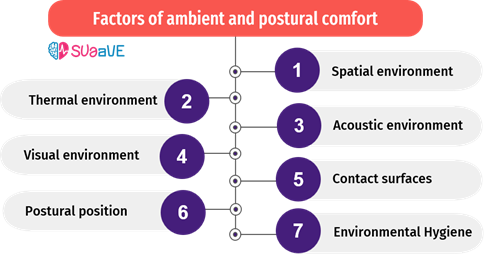
- Spatial Environment defines the level of perceived space within the occupant environment, with relation to the demands of the user (Lavieri and Bhat, 2019). A level of spatial comfort can be evaluated based upon the following factors:
- Headroom (Proximity of vehicle trim to head).
- Vertical:
- Longitudinal.
- Lateral.
- Body room (Proximity of vehicle trim to body).
- Degree of spatial separation to other occupants (Proxemics).
- Cabin lighting characteristics.
- Exterior visibility.
- Vertical:
- Thermal Environment covers the thermal environment of the vehicle cabin, following the individual characteristics and state of each user (Musat and Helerea, 2009). Thermal comfort evaluation is made up of the following components:
- Ambient conditions meeting the occupant demands:
- Ambient temperature.
- Ambient humidity.
- Airflow meeting demands of the occupant:
- Speed.
- Direction.
- Temperature.
- Humidity.
- The capability for the cabin to adapt to a state which meets the context of use and the preferences of each occupant.
- Ambient conditions meeting the occupant demands:
- Acoustic Environment refers to components of the vehicle cabin sound and vibration characteristics (Nor et al., 2008). Acoustic comfort attributes are:
- Sound levels within the vehicle cabin.
- Tonality and frequency characteristics of sound.
- The capability for the cabin to adapt to a state which meets the context of use and the preferences of each occupant.
- Visual Environment refers to visible components of the vehicle occupant environment (Wienold, 2007). The measurement of visual comfort comprises of:
- Lighting sources within cabin:
- Natural light.
- Artificial light.
- Characteristics of light within the cabin:
- Colour.
- Intensity.
- Source position.
- Position of illumination.
- Levels of discomfort glare.
- The capability for the cabin to adapt to a state which meets the context of use and the preferences of each occupant.
- Lighting sources within cabin:
- Contact Surfaces (Tactile Interaction) concerns the comfort in interacting with systems requiring touching (e.g. touchscreen).
- Postural position refers to components of the occupants’ physical position when traveling inside the vehicle cabin, following the characteristics and state of each occupant (Parida et al., 2018). The quantification of postural comfort is based upon the following aspects:
- The vehicle seat providing a seated position which is compatible with the occupant activity:
- Productive tasks.
- Inter-occupant interaction.
- Media consumption.
- Relaxing / sleeping.
- The capability for the cabin to adapt to a state which meets the context of use and the preferences of each occupant.
- Provides acceptable degrees of transient posture.
- Environmental Hygiene is comprised of a variety of factors governing the users sensation of cleanliness and hygiene whilst traveling within the vehicle (Lavieri and Bhat, 2019). The overall hygienic comfort of the vehicle comprises of factors including:
- Air quality.
- Cabin odor.
- Cleanliness of surfaces.
- Characteristics and behaviour of other users (shared use).
- Vehicle state.
- The capability for the cabin to adapt to a state which meets the context of use and the preferences of each occupant.
For more information about the ego vehicle factors that could influence the passenger’s state, please see Deliverable 3.1. Framework of the emphatic module and preliminary relationship among automotive factors with cognitive and emotional passenger state.
https://www.suaave.eu/wp-content/uploads/sites/17/2019/11/SUaaVE_WP3_D3.1_20191031_V100.pdf


